Contrôle étude de cas du système: régulateur de vitesse
Après que le système a été linéarisé, un schéma fonctionnel du système en utilisant la transformée de Laplace (LT) techniques de commande de rétroaction de la vitesse du véhicule peut être construite. L'équation différentielle peut maintenant être prise à la s-domaine en prenant la transformée de Laplace (LT) des deux côtés.
Prenant le LT de toutes les quantités de domaine de temps produit correspondant s-les quantités de domaine. De la note spéciale LT du terme dérivé, sous conditions initiales nulles, en résulte s fois la quantité transformée et de la LT d'une fonction de l'étape est de 1 /s:
Enfin, vous pouvez résoudre pour
en termes de l'entrée des gaz
et toute colline apparition g # 952-:

La réécriture de l'équation finale sur la droite, identifie ce qui est connu comme le plante, dans ce cas, la fonction système linéarisé pour la dynamique du véhicule, ainsi que la perturbation g # 952- terme en raison de la colline au début t = 0. Notez la perturbation pénètre dans la plante sans l'inclusion du terme de gain vmax/T.
Le schéma de principe du système, y compris une contrôleur à conduire le réglage du papillon des gaz et un capteur de rétroaction de la vitesse de véhicule, est représenté sur la figure.
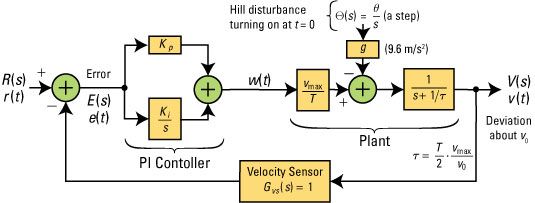
Le delta de l'indice est tombé sur les signaux W(s) Et V(s), Étant entendu que ces quantités représentent des écarts de distance et de vitesse d'étranglement à partir des paramètres d'étranglement et de la vitesse nominale, respectivement. Pour le contrôleur, un (PI) bloc de construction proportionnelle intégrale est utilisé, avec des constantes de gain Kp pour le trajet proportionnel et Kje pour l'intégrale de chemin. Ce contrôleur est assez fréquent dans les systèmes de contrôle.
Remarque dans un contrôleur de PI les fonctions proportionnel et intégral sont en parallèle.
L'entrée de schéma de principe est R(s), Qui est le LT de r(t), L'entrée de commande pour le régulateur de vitesse. L'entrée de commande représente l'entrée de l'utilisateur, qui établit la vitesse du véhicule souhaitée pour v0 mph.
Ce qui reste est de trouver la fonction du système en boucle fermée H(s) = V(s) / R(s). Vous commencez à partir de la fonction du système en boucle ouverte, g0(s), Qui est le produit de la s-les fonctions du système de domaine en cascade de l'entrée à la sortie, avec les évaluations enlevé et la perturbation à zéro:
Avec la réaction de capteur de vitesse est connecté, la sortie V(s) est juste [R(s) - V(s)] À la sortie de l'été (à l'extrême gauche) fois g0(s). Résolution pour le rapport V(s) /R(s) Vous donne la réponse en boucle fermée:
où sur la droite g0(s) Est inséré et les substitutions suivantes faites:
La forme standard pour un dénominateur second ordre est
où # 969-n est le fréquence naturelle en rad / s et z est le facteur d'amortissement. Assimiler termes entre les deux résultats dénominateurs dans les équations de conception
Pour étudier l'impact de la colline apparition sur le régulateur de vitesse, vous avez besoin de la fonction du système concernant le signal d'erreur E(s) À l'entrée de perturbation # 920- (s) quand R(s) = 0. Le travail à V(s) Initialement,
Car E(s) = -V(s) quand R(s) = 0 (zéro parce que le type de commande est nulle par hypothèse), le résultat précédent est valable pour E(s) Avec un changement de signe. La fonction Python personnalisé régulateur de vitesse(WN, zeta, T, vcruise, vmax, tf_mode) calcule la fonction du système b et un coefficient tableaux pour H(s), E(s) / # 920- (s), E(s) / R(s), Et W(s) / R(s). Accéder à la fonction dans le module ssd.py.
Contrôle Étude de cas Système: Régulateur de vitesse

-
 Composants électroniques: amplificateurs de boucle fermée
Composants électroniques: amplificateurs de boucle fermée -
 Équations différentielles classeur pour les nuls
Équations différentielles classeur pour les nuls -
 Résolution d'équations différentielles à l'aide de solutions transformée de Laplace
Résolution d'équations différentielles à l'aide de solutions transformée de Laplace -
 Analyser un circuit de premier ordre RL en utilisant des méthodes de Laplace
Analyser un circuit de premier ordre RL en utilisant des méthodes de Laplace -
 Déterminer le domaine et dans une fonction trig
Déterminer le domaine et dans une fonction trig -
 Analyser un circuit de premier ordre rc en utilisant des méthodes de Laplace
Analyser un circuit de premier ordre rc en utilisant des méthodes de Laplace
Utilisation de la transformée de Laplace dans le cadre de votre analyse de circuit vous fournit une prédiction de la réponse du circuit. Analyser les pôles de la transformée de Laplace pour avoir une idée générale du comportement de sortie.…
Si vous pouvez utiliser une équation différentielle du second ordre pour décrire le circuit que vous cherchez à, alors vous avez affaire à un circuit de deuxième ordre. Circuits comprenant un inducteur, un condensateur, et résistance…
Si vous êtes intéressés à comprendre comment le circuit de rétroaction fonctionne, rappelez-vous cette règle des amplis op électroniques: Si la tension d'entrée est autre chose que zéro, l'ampli op sera saturé, et la tension de sortie sera…
Le circuit ampli op peut résoudre des équations mathématiques rapides, y compris des problèmes de calcul telles que les équations différentielles. Pour résoudre une équation différentielle en trouvant v (t), Par exemple, vous pouvez…
Transformée de Laplace méthodes peuvent être employées pour étudier circuits dans le s-domaine. Techniques Laplace transforment des circuits avec des signaux de tension et de courant qui changent avec le temps à la s-domaine de sorte que vous…
Un vaste monde des propriétés est associée à des signaux et des systèmes - abondance dans le calcul seul! Voici dix propriétés inoubliables relatifs aux signaux et systèmes de travail.LTI stabilité du systèmeTemps linéaire invariant (LTI)…
Signaux en temps continu et les systèmes ne prennent jamais une pause. Quand un circuit est câblé, un signal est là pour la prise, et le système commence à travailler - et ne cesse pas. Gardez à l'esprit que le terme signal est utilisé ici…
Signaux à temps discret et systèmes marchent le long de la tique d'une horloge. La modélisation mathématique des signaux à temps discret et systèmes montre que l'activité se produit avec nombre entier (integer) l'espacement, mais les signaux…
Les outils informatiques jouent un grand rôle dans les signaux et les systèmes modernes d'analyse et de conception. Différentielle LCC et équations aux différences sont une partie fondamentale des systèmes simples et très complexes.…
Voici un aperçu de niveau système au signaux et systèmes modèle d'une machine à karaoké - un système de lecture audio avec un haut-parleur puissant qui permet à une personne à chanter sur la musique enregistrée. Une interface multimédia…
Vous avez probablement un certain niveau de familiarité avec l'électronique grand public, tels que les lecteurs MP3, les smartphones et les tablettes, et de réaliser que ces produits reposent sur des signaux et des systèmes. Mais vous pouvez…
L'étude des signaux et systèmes établit un formalisme mathématique pour l'analyse, la modélisation et la simulation des systèmes électriques dans le temps, la fréquence et s- ou z-domaines. Signaux existent naturellement et sont également…
Pour trouver la réponse totale d'un circuit RC série, vous devez trouver la réponse à entrée nulle et la réponse à l'état zéro, puis ajoutez-les ensemble. Un circuit série RC du premier ordre possède une résistance (ou réseau de…
Des techniques d'analyse de circuit dans le s-domaine sont puissants parce que vous pouvez traiter un circuit qui a signaux de tension et de courant changent avec le temps comme si elle était une résistance-seul circuit. Cela signifie que vous…