Comment utiliser pylab pour différentiel de lcc et équations aux différences
Les outils informatiques jouent un grand rôle dans les signaux et les systèmes modernes d'analyse et de conception. Différentielle LCC et équations aux différences sont une partie fondamentale des systèmes simples et très complexes. Heureusement, des outils logiciels actuels permettent de travailler sur plusieurs domaines avec ces équations LCC sans trop de douleur.
Sommaire
LCC différentielles et de différence équations sont complètement caractérisés par le {unk} Et {bk} Coefficient ensembles. Vous pouvez utiliser des outils tels que Pylab avec le SciPy signal paquet de concevoir des filtres à haute performance, en particulier dans le domaine discret dans le temps. Les fonctions de conception de filtre de signal vous donner le {unk} Et {bk} Coefficients en réponse aux exigences de conception d'entrée. Vous Vous pouvez ensuite utiliser les conceptions de filtre dans la simulation de systèmes plus grands.
Temps continu
Trois représentations du système d'équation différentielle de la LCC sont le temps, la fréquence, et s-domaines, et les mêmes ensembles de coefficients, {bk} Et {unk}, Exister dans les trois représentations. Voici les relations d'entrée et de sortie correspondants dans ces domaines:
Domaine du temps (de l'équation différentielle):
Domaine temps (de réponse impulsionnelle):
Domaine de fréquence:
s-domaine:
Dans la deuxième ligne de l'équation différentielle, la réponse impulsionnelle, h(t), Ainsi que l'intégrale de convolution produisent la sortie, y(t), À partir de l'entrée, X(t). Dans la troisième ligne, le théorème de convolution pour transformées de Fourier produit le spectre de sortie, Y(F), Comme le produit de la gamme d'entrée, X(F), Et la réponse en fréquence, H(F) - Qui est la transformée de Fourier de la réponse impulsionnelle.
Dans la quatrième ligne, le théorème de convolution pour Laplace transforme le produit s-sortie de domaine, Y(s), Comme le produit de l'entrée, X(s), Et la fonction de système, H(s) - Qui est la transformée de Laplace de la réponse impulsionnelle.
Les figurehighlights les fonctions clés dans PyLab et de la ssd.py module de code vous pouvez utiliser pour travailler sur plusieurs domaines en temps continu. Rappelez-vous, ces fonctions sont au plus haut niveau. Vous pouvez intégrer de nombreuses fonctions de niveau inférieur (comme les mathématiques, la manipulation des tableaux, et les fonctions de la bibliothèque de traçage) avec ces fonctions de haut niveau pour mener à bien des tâches spécifiques d'analyse.
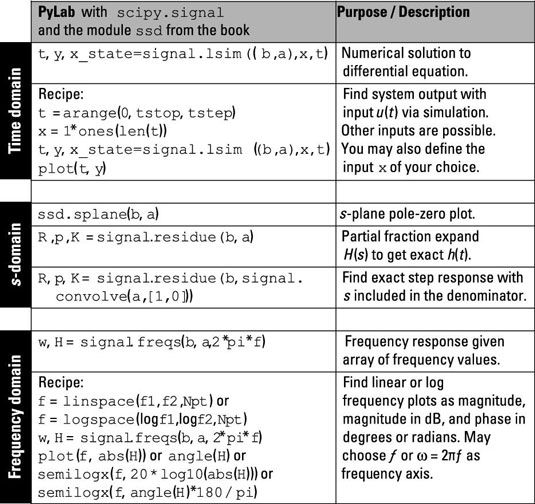
Voici ce que vous pouvez trouver:
Les lignes domaine du temps montrent une recette pour résoudre l'équation différentielle en utilisant numériquement signal.lsim ((b, a), x, t) pour une entrée de fonction en escalier. Les tableaux b et un correspondent aux ensembles de coefficients {bk} Et {unk}. Les signaux d'entrée de votre choix sont possibles, aussi. La simulation dans le domaine temporel vous permet de caractériser le comportement d'un système au niveau de la forme d'onde réelle.
Dans le s-rangées de domaine, trouver l'intrigue pôle-zéro de la fonction du système H(s) en utilisant ssd.splane (b, a). Aussi savoir comment résoudre le développement en fraction partielle (PFE) des H(s) Et H(s) /s à obtenir une représentation mathématique de la réponse impulsionnelle ou la réponse à un échelon.
La section dans le domaine fréquentiel propose une recette pour le tracé de la réponse en fréquence du système à l'aide de signal.freqs (B, A, 2 * pi * f). Les options incluent une chaîne linéaire ou axe de fréquence de journal, l'ampleur de la réponse en fréquence, et la réponse en phase en degrés.
Temps discret
Tout comme pour les systèmes d'équations différentielles décrites dans la section précédente, le système d'équations de différence de LCC a trois représentations: le temps, la fréquence, et zdomaines, et les mêmes ensembles de coefficients, {bk} Et {unk}, Exister dans les trois représentations. Voici les relations d'entrée et de sortie correspondants dans ces domaines:
Dans le domaine temporel (de l'équation de différence):
Domaine temps (de réponse impulsionnelle):
Domaine de fréquence:
z-domaine:
Dans la deuxième ligne de l'équation de différence, la réponse impulsionnelle, h[n], De même que la somme de convolution produire la sortie, y[n], Former l'entrée, X[n]. Dans la troisième ligne, le théorème de convolution pour transformées de Fourier produit le spectre de sortie,
qui est le temps discret de transformée de Fourier de la réponse impulsionnelle.
Dans la quatrième ligne, le théorème de convolution pour ztransforme le produit zsortie de domaine, Y(z), Comme le produit de l'entrée, X(z), Et la fonction de système, H(z), qui est le ztransformer de la réponse impulsionnelle.
Le chiffre met en évidence les fonctions clés dans PyLab et la coutume ssd.py module de code vous pouvez utiliser pour travailler sur plusieurs domaines en temps discret.
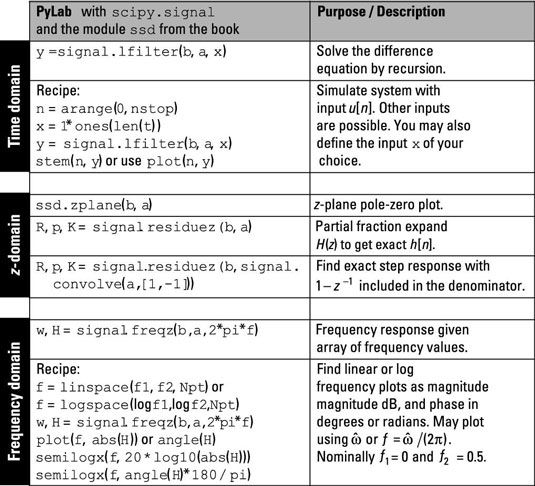
Dans les rangs du domaine temporel, à résoudre l'équation de différence exactement, à l'aide signal.lfilter (b, a, x).
Dans le zrangées de domaine, vous pouvez trouver l'intrigue pôle-zéro de la fonction du système H(z), En utilisant ssd.zplane (b, a), et l'expansion de fraction partielle, à l'aide signal.residuez au lieu de signal.residue.
Les rangées de domaine de fréquence vous montrer comment trouver la réponse en fréquence d'un système à temps discret avec signal.freqz (B, A, 2 * pi * f), où F est la variable de fréquence
-
 Équations différentielles classeur pour les nuls
Équations différentielles classeur pour les nuls -
 Résolution d'équations différentielles à l'aide de solutions transformée de Laplace
Résolution d'équations différentielles à l'aide de solutions transformée de Laplace -
 Analyser un circuit de premier ordre RL en utilisant des méthodes de Laplace
Analyser un circuit de premier ordre RL en utilisant des méthodes de Laplace -
 Analyser un circuit de premier ordre rc en utilisant des méthodes de Laplace
Analyser un circuit de premier ordre rc en utilisant des méthodes de Laplace -
 Analyser un circuit RLC en utilisant des méthodes de Laplace
Analyser un circuit RLC en utilisant des méthodes de Laplace -
 Décrire circuits de second ordre avec des équations différentielles du second ordre
Décrire circuits de second ordre avec des équations différentielles du second ordre
Circuits de filtrage (tels que les filtres passe-bas, des filtres passe-haut, des filtres passe-bande et éliminateurs de bande) façonner le contenu fréquentiel des signaux en permettant que certaines fréquences de passer à travers. Vous pouvez…
Un vaste monde des propriétés est associée à des signaux et des systèmes - abondance dans le calcul seul! Voici dix propriétés inoubliables relatifs aux signaux et systèmes de travail.LTI stabilité du systèmeTemps linéaire invariant (LTI)…
Voici les erreurs courantes onze élèves lorsqu'ils tentent de résoudre les problèmes et comment les éviter. Ralentir suffisamment pour réfléchir à des solutions, et assurez-vous de votre compréhension fondamentale de la matière de base est…
La série de Fourier est un outil mathématique puissant, et il applique à plusieurs branches de l'ingénierie et des mathématiques. La conception d'un fréquence tripler est un bon exemple de la série de Fourier en action. Pour ordinateur et…
La vraie affaire avec un égaliseur à dix bandes est que vous pouvez visualiser graphiquement la mise en forme spectrale que vous fournissez au signal passant par l'égaliseur simplement en regardant les positions des contrôles de gain de curseur,…
Dans l'étude des systèmes à la fois en temps continu et à temps discret, la réponse en fréquence et de sa relation au pôle et zéro endroits dans le s- et z-avions, respectivement, sont d'une importance fondamentale.Cette vidéo utile…
Signaux en temps continu et les systèmes ne prennent jamais une pause. Quand un circuit est câblé, un signal est là pour la prise, et le système commence à travailler - et ne cesse pas. Gardez à l'esprit que le terme signal est utilisé ici…
Après que le système a été linéarisé, un schéma fonctionnel du système en utilisant la transformée de Laplace (LT) techniques de commande de rétroaction de la vitesse du véhicule peut être construite. L'équation différentielle peut…
Un analyseur de spectre numérique de base est montré dans la figure. La fenêtre par défaut, w[n], Est une constante de l'un sur l'intervalle de capture Nr échantillons. La FFT fonctionne avec un signal discret dans le temps de longueur finie.…
Un filtre de pointe pour un égaliseur graphique audio fournit gain ou la perte (atténuation) à une fréquence de centre spécifique Fc. Un filtre de pointe a une magnitude de fréquence de l'unité de réponse, ou 0 dB de gain, à des fréquences…
Vous êtes donné la tâche de concevoir un analogue (en temps continu) filtrer pour répondre aux spécifications de réponse d'amplitude indiqués. Vous avez également besoin de trouver la réponse de l'étape de filtration, de déterminer la…
L'ordre zéro-hold (ZOH), qui est inhérent à de nombreuses numériques-analogiques (CNA convertisseurs), détient la constante de sortie analogique entre les échantillons. L'action des introduit de ZOH freQuency statisme, un rouleau hors de la…
Vous ne pouvez pas apprécier pleinement les mathématiques de signaux et les systèmes sur votre première rencontre. Pour améliorer votre compréhension, vous pouvez utiliser l'animation par ordinateur pour donner vie à quelques-uns des concepts…
L'étude des signaux et systèmes établit un formalisme mathématique pour l'analyse, la modélisation et la simulation des systèmes électriques dans le temps, la fréquence et s- ou z-domaines. Signaux existent naturellement et sont également…