Construction de robots pour les nuls
Si vous construisez un robot, vous faites beaucoup de connexions électriques, de sorte que vous faites affaire avec beaucoup d'épingles. Le tableau suivant montre le signal de connecteurs d'expansion et les numéros de broches. Il peut aider à prévenir les connexions transversales indésirables.
| Connecteur d'extension | Code PIN | Signal | Connecteur d'extension | Code PIN | Signal |
|---|
| 1,2 | | Sol | 16 | P11 | LED verte |
| 3,4 | | +5 volts | 17 | P12 | Jumper J7 |
| 5 | P0 | Moustaches Gauche | 18 | P13 | Jumper J6 |
| 6 | P1 | Moustache droite | 19 | P14 | Switch 1 |
| 7 | P2 | Moustaches arrière | 20 | P15 | Switch 2 |
| 8 | P3 | Capteur de température | 21 | | RB7 du coprocesseur |
| 9 | P4 | Capteur de lumière | 22 | | Impulsion de codeur |
| 10 | P5 | Capteur PIR | 23 | | Le moteur servo # 1 |
| 11 | P6 | RC entrée du moteur d'entraînement | 24 | | Le moteur servo # 2 |
| 12 | P7 | Sortie vocale | 25 | | Le moteur servo # 3 |
| 13 | P8 | Réseau de coprocesseurs | 26 | | Le moteur servo # 4 |
| 14 | P9 | Haut-parleur | 27-40 | Inutilisé | |
| 15 | P10 | LED rouge | | | |
Percer tailles de vis courants utilisés dans la construction de robots
Le tableau suivant montre les forage du robinet et de dédouanement des tailles de foret à utiliser avec différentes tailles de vis qui sont couramment utilisés dans la construction de robot. Garder cette information à portée de main peut vous faire économiser un peu pendant que vous construisez.
| Vis | Tap Drill | Dégagement Drill |
|---|
| 2-256 | .070 (n ° 50) | .089 (n ° 43) |
| 4-40 | .089 (n ° 43) | .116 (n ° 32) |
| 6-32 | .106 (n ° 36) | .144 (n ° 27) |
| 8-32 | .136 (n ° 29) | .170 (n ° 18) |
| 10-32 | .159 (n ° 21) | .196 (N ° 9) |
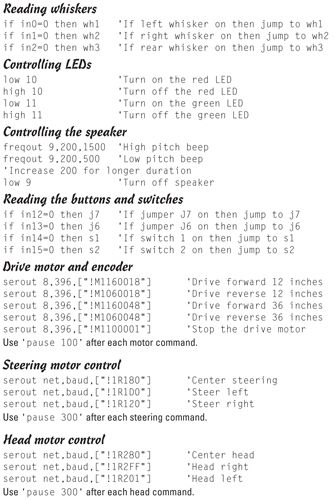
PBasic Programmation Références pour la construction de robots
Si vous êtes intéressé par la construction de robots, vous allez travailler avec PBasic, le langage utilisé pour écrire du code pour les microprocesseurs. Les listes suivantes vous indiquent comment utiliser PBasic programme pour aider les différentes fonctions:
A propos Auteur
 Projets électroniques: comment connecter un servo à un timbre de base
Projets électroniques: comment connecter un servo à un timbre de base Pour créer un mouvement, vous pouvez ajouter un dispositif très utile, appelé servo, à votre projet de l'électronique. UN servo est un type spécial de moteur qui est conçu pour tourner à une position particulière et maintenez cette position…
 Projets électroniques: comment créer des constantes dans le code PBASIC
Projets électroniques: comment créer des constantes dans le code PBASIC Si vous commencez à utiliser des circuits programmables dans vos projets d'électronique, vous finirez par écrire du code. Si votre circuit programmable est un BASIC Stamp, vous allez écrire ce code dans PBASIC.Dans PBASIC, vous pouvez créer vos…
Projets électroniques: comment créer des noms dans le code PBASIC Lorsque vos projets d'électronique, vous prennent dans le domaine des circuits programmables, vous pouvez vous retrouver à écrire un peu de code PBASIC. Dans PBASIC, vous pouvez créer des noms à utiliser comme étiquettes de programme. Vous…
Projets électroniques: comment faire des mathématiques dans le code PBASIC Un peu de programmation est en ordre pour votre projet de l'électronique lorsque vous utilisez des microprocesseurs programmables comme le BASIC Stamp. Le BASIC Stamp Parallax utilise BASIC (PBASIC). PBASIC vous permet d'effectuer l'addition,…
 Projets électroniques: comment multi-flash LED avec un timbre de base
Projets électroniques: comment multi-flash LED avec un timbre de base Ce projet de l'électronique commence par la connexion 6 LED pour la planche à pain dans un conseil Stamp HomeWork BASIC puis continue en montrant la programmation nécessaire à clignoter tous les voyants sur et en dehors. Vous pouvez jouer avec…
 Projets électroniques: comment programmer un servo en PBASIC
Projets électroniques: comment programmer un servo en PBASIC Pour créer un mouvement dans votre projet de l'électronique, vous pouvez ajouter un dispositif très utile, appelé servo, qui vous permet de contrôler le mouvement mécanique avec un programme BASIC Stamp. UN servo est un type spécial de moteur…
Projets électroniques: comment utiliser endif et d'autre dans le code PBASIC Programmation en PBASIC est un mal nécessaire lorsque vous utilisez des microprocesseurs programmables comme le BASIC Stamp dans vos projets électroniques. PBASIC vous permet d'effectuer la logique dans votre programme grâce à l'utilisation de…
Projets électroniques: comment utiliser si les états dans le code PBASIC Lorsque vous utilisez des microprocesseurs programmables comme le BASIC Stamp dans votre projet de l'électronique, un peu de programmation est en ordre. Le BASIC Stamp Parallax utilise BASIC (PBASIC), un cousin proche du langage de programmation…
Projets électroniques: comment utiliser les commentaires dans le code PBASIC Si vous êtes en utilisant un BASIC Stamp pour contrôler les fonctions d'un projet d'électronique, vous serez l'écriture de code dans Parallax BASIC (PBASIC). Utiliser les commentaires dans votre code vous aidera à se souvenir de ce que chaque…
Tailles de perçage couramment utilisés dans l'électronique Circuits de construction et autres appareils électroniques nécessite une petite perceuse électrique, sans fil ou non. Investir dans un petit banc de montage perceuse si vous installez des circuits dans des boîtes de projet et les armoires de…
 Composants électroniques: l'achat d'un timbre de base
Composants électroniques: l'achat d'un timbre de base UN BASIC Stamp est un système d'ordinateur complet essentiellement autonome destiné à être utilisé dans des circuits électroniques. Bien que vous pouvez acheter un microcontrôleur BASIC Stamp par lui-même, la meilleure façon d'entrer dans…
 Projets électroniques: comment utiliser un servo dans un circuit
Projets électroniques: comment utiliser un servo dans un circuit UN servo est un type spécial de moteur pour une utilisation dans l'électronique qui est conçu pour tourner à une position particulière et maintenez cette position jusqu'à ce que dit de tourner à une position différente. Loisir servos sont…
 Projets électroniques: comment écrire un programme PBASIC
Projets électroniques: comment écrire un programme PBASIC Vous pouvez utiliser un microcontrôleur BASIC Stamp pour créer des effets spéciaux à vos projets électroniques numériques. Mais d'abord vous devez apprendre comment écrire des programmes pour contrôler le contrôleur. Si vous avez jamais…
Exclure les pages web des moteurs de recherche à l'aide de balises meta robots Vous pouvez utiliser balises meta robots pour empêcher une araignée de moteur de recherche de ramper pages spécifiques de votre site Web. Vous pouvez inclure une balise spéciale dans le code HTML de la page pour dire robots de ne pas indexer la…



