Comment contrôler la vitesse d'un moteur à courant continu avec la arduino
Besoin d'un plus grand contrôle de votre moteur à courant continu? Vous pouvez utiliser le croquis MotorControl pour l'Arduino pour mettre un peu d'entrée dans un moteur à courant continu pour vous donner le plein contrôle du moteur à la volée.
Sommaire
Le croquis MotorControl
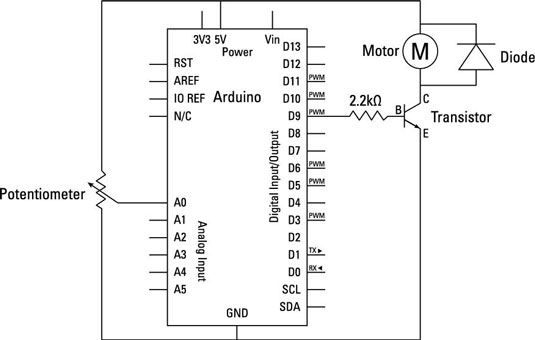
Pour prendre le contrôle de la vitesse de votre moteur chaque fois que vous en avez besoin, vous devez ajouter un potentiomètre à votre circuit.
Tu as besoin:
Un Arduino Uno
Une maquette
Transistor
Un moteur à courant continu
Une diode
Une résistance variable 10k ohms
Une résistance de 2.2k ohms
Fils de saut
Trouver un espace sur votre carte de test pour placer votre potentiomètre. L'axe central du potentiomètre est raccordé retour à la broche 9 en utilisant un fil de saut, et les deux broches restantes sont connectés à 5V sur un côté et GND de l'autre.
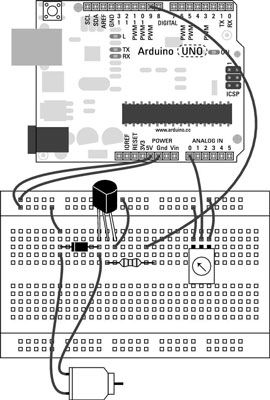
Le 5V et GND peuvent être de chaque côté, mais les allumer inversent la valeur que le potentiomètre envoie à l'Arduino. Bien que le potentiomètre utilise la même puissance et la masse comme le moteur, notez qu'ils sont des circuits séparés que les deux communiquer à travers le Arduino.
Après avoir construit le circuit, ouvrir une nouvelle esquisse Arduino et l'enregistrer avec un autre nom et inoubliable, comme myMotorControl. Ensuite, tapez le code suivant.
int potPin = A0-int motorPin = 9-int potValue = 0-int motorValue = configuration 0-void () {Serial.begin (9600) -} void loop () {potValue = analogRead(potPin) -motorValue = carte(potValue, 0, 1023, 0, 255) -analogWrite(motorPin, motorValue) -Serial.print ("potentiomètre =") -Serial.print(potValue) -Serial.print (" t moteur =") -Serial.println(motorValue) -retard(2) -}Une fois que vous avez tapé le croquis, l'enregistrer et cliquez sur le bouton Compile pour mettre en évidence les erreurs de syntaxe. .
Si l'esquisse compile correctement, cliquez sur Télécharger pour télécharger l'esquisse à votre conseil. Lorsque cela est fait le téléchargement, vous devriez être en mesure de contrôler votre moteur à l'aide du potentiomètre. Tourner le potentiomètre dans un sens provoque le moteur pour accélérer amont tournant dans l'autre sens amène à ralentir.
La répartition MotorControl Sketch
Ce croquis est une variation sur le croquis AnalogInOutSerial et fonctionne exactement de la même manière avec quelques changements de noms pour mieux indiquer ce que vous contrôle et de surveillance sur le circuit.
Comme toujours, vous déclarez les différentes variables utilisées dans l'esquisse. Vous utilisez le potPin d'assigner l'axe de potentiomètre et motorPin d'envoyer un signal au moteur. La variable potValue est utilisé pour stocker la valeur brute du potentiomètre et les magasins variables motorValue la valeur convertie que vous voulez à la sortie au transistor de commuter le moteur.
int potPin = A0-int motorPin = 9-int potValue = 0-int motorValue = 0-
Comment modifier l'esquisse MotorControl
Vous trouverez peut-être qu'il ya une vitesse minimale après laquelle le moteur sera juste ronflement. Il le fait parce qu'il n'a pas assez de puissance pour faire tourner. En surveillant les valeurs envoyées au moteur en utilisant l'esquisse MotorControl, vous pouvez trouver la valeur minimale du moteur de tourner et d'optimiser la motorValue à faire tourner le moteur au sein de sa véritable portée.
Pour trouver la gamme de motorValue, Suivez ces étapes:
Avec l'esquisse MotorControl téléchargé, cliquez sur le bouton de série du moniteur en haut à droite de votre fenêtre Arduino.
La fenêtre du moniteur de série va vous montrer la valeur du potentiomètre suivi de la valeur de sortie qui est envoyé au moteur, de cette façon:
potentiomètre = 255 = 1023 moteur
Ces valeurs sont affichées dans une longue liste mise à jour et que vous tournez le potentiomètre. Si vous ne voyez pas la liste défilement vers le bas, assurez-vous que l'option Automatique est sélectionnée.
En partant de votre potentiomètre lecture d'une valeur de 0, tournez votre potentiomètre très lentement jusqu'à ce le bourdonnement arrête et le moteur commence à tourner.
Prenez note de la valeur affichée à ce stade.
Utilisez un si énoncé à dire le moteur pour modifier la vitesse uniquement si la valeur est supérieure à la vitesse minimale nécessaire pour faire tourner le moteur, comme suit:
(un). Trouvez la partie de votre code qui écrit le motorValue au moteur:
analogWrite(motorPin, motorValue) -
(b). Remplacez-le par le morceau de code suivant:
si(motorValue> yourValue) { analogWrite(motorPin, motorValue) -} autre { digitalWrite(motorPin, LOW) -}Maintenant remplacer yourValue avec le numéro que vous avez fait une note.
Si la valeur motorValue est supérieur à ce que le moteur accélère. Si elle est inférieure à ce que la broche est écrit FAIBLE de sorte qu'il est complètement hors tension. Vous pouvez également taper analogWrite (motorPin, 0) pour accomplir la même chose. Petites optimisations comme cela peut aider votre fonction de projet en douceur, sans aucun mouvement ou des valeurs gaspillé.
-
 Ajouter le lecteur RFID à votre système d'entrée du clavier
Ajouter le lecteur RFID à votre système d'entrée du clavier -
 Comment ajouter et tester l'écran LCD pour votre projet d'horloge Arduino
Comment ajouter et tester l'écran LCD pour votre projet d'horloge Arduino -
 Comment ajouter des entrées du clavier à l'œil qui voit tout
Comment ajouter des entrées du clavier à l'œil qui voit tout -
 Comment calibrer vos entrées avec le Arduino
Comment calibrer vos entrées avec le Arduino - Comment modifier la vitesse d'un moteur à courant continu avec l'Arduino
-
 Comment contrôler votre servo avec l'Arduino
Comment contrôler votre servo avec l'Arduino
Vous pouvez créer des mouvements de balayage sur un servomoteur avec l'Arduino. A balayages de servomoteurs de 0 # 186- 186- 179 #, puis de nouveau, d'une manière semblable au mouvement d'une vieille horloge rotative.L'esquisse de balayageTu as…
L'Arduino vous permet d'aller au-delà de la lecture d'un son - vous créez votre propre instrument, semblable à la Theremin. La Theremin, nommé d'après son inventeur L # 233 sur Theremin, a été l'un des premiers instruments électroniques,…
Vous apprendrez comment faire un bouton à l'écran dans le traitement qui affecte une LED physique sur votre Arduino. Ceci est une excellente esquisse pour commencer avec des interactions entre les ordinateurs et le monde réel, et entre un Arduino…
La seule chose de mieux que d'envoyer des signaux à traitement envoie des signaux multiples, non? Envoyer des signaux multiples est souvent une pierre d'achoppement, cependant, parce que même si l'envoi de valeurs à partir de plusieurs capteurs…
Le moteur à courant continu dans votre kit Arduino est le plus fondamental de moteurs électriques et est utilisé dans tous les types de l'électronique de loisirs. Lorsque le courant est passé à travers, il tourne en continu dans une direction…
Le contenu de circuits et croquis Arduino peut varier considérablement. Avant de commencer, il ya un processus simple pour télécharger un croquis à une carte Arduino que vous pouvez renvoyer à.Suivez ces étapes pour télécharger votre…
Ces projets Arduino sont conçus pour afficher la valeur des intrants à l'aide du en série moniteur. Sériel un procédé de communication entre un périphérique et un ordinateur. Dans ce cas, il est la communication série sur Universal Serial…
L'esquisse précédente vous a montré comment utiliser un digitalRead à lire soit allumé ou éteint, mais que faire si vous voulez gérer une valeur analogique comme un interrupteur ou une commande de bouton de volume gradateur?Pour ce projet,…
Ceci est la première et peut-être la plus fondamentale d'entrées que vous pouvez et devez apprendre à vos projets Arduino: le bouton-poussoir modeste. Pour ce projet Arduino, vous devrez:Un Arduino UnoUne maquetteUne résistance de 10k ohmsUn…
Un transistor dans un circuit électronique fonctionne comme une combinaison d'une diode et d'une résistance variable, encore appelé potentiomètre ou pot. Mais ce ne sont pas juste un pot-ordinaire, il est un pot magique dont le bouton est…
Ce projet présente un circuit de planche à pain qui pousse un petit 3 V moteur à courant continu à partir d'un port parallèle. Parce que ce moteur utilise beaucoup plus de courant que d'un port parallèle peut gérer, un tableau ULN2003…
De nombreux circuits électroniques nécessitent une résistance pouvant être modifiée par l'utilisateur. Par exemple, la plupart des amplificateurs audio comprennent un contrôle de volume qui permet à l'utilisateur augmenter le volume ou vers…
Dans ce projet, de l'électronique, vous utilisez deux 555 jetons de minuterie pour construire un signal sonore, avec deux minuteries configurés en mode astable. Chaque fois que contrôle une tonalité différente sur le signal sonore.Une minuterie…
UN potentiomètre (souvent appelé pot) Est une résistance variable électronique avec un bouton vous pouvez tourner à varier la résistance. Pots de divers types sont souvent utilisés comme dispositifs d'entrée pour les projets BASIC Stamp. Par…