Comment contrôler votre servo avec l'Arduino
En utilisant un potentiomètre (ou tout capteur analogique), il est possible de contrôler directement votre servo avec l'Arduino de la même manière que vous souhaitez contrôler une griffe mécanique à arcades.
L'esquisse de Bouton
Cet exemple vous montre comment vous pouvez facilement utiliser un potentiomètre pour déplacer votre asservissement à un diplôme spécifique.
Tu as besoin:
Un Arduino Uno
Une maquette
Un servo
Une résistance variable 10k ohms
Fils de saut
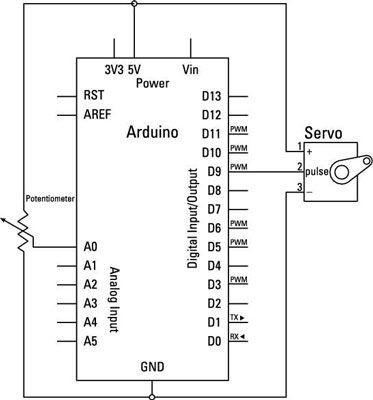
Le servo est câblé exactement comme dans l'exemple de balayage, mais cette fois vous avez besoin de connexions supplémentaires à 5V et GND pour le potentiomètre, vous devez donc utiliser une planche à pain de fournir les broches supplémentaires. Connectez les broches 5 V et GND sur l'Arduino à la borne positive (+) et négatif (-) rangées sur la planche à pain.
Raccorder le servo à la planche à pain en utilisant soit une rangée de trois repères de la tête ou trois fils de saut. Branchez la prise rouge à la ligne 5V, la prise noir / marron à la ligne GND, et la prise blanche / jaune à la broche 9 sur l'Arduino.
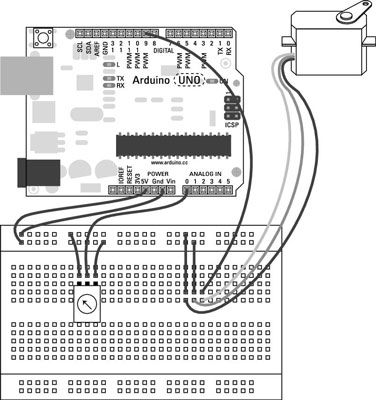
Trouver un espace sur la carte de test pour le potentiomètre. Connectez la broche centrale à la broche A0 sur le Arduino et les broches restantes à 5V sur un côté et GND de l'autre.
Après avoir construit le circuit, ouvrir l'esquisse en choisissant File-exemples-Servo-Bouton. Le code de l'esquisse est comme suit:
// Commander une position d'asservissement à l'aide d'un potentiomètre (résistance variable) // par Michal Rinott #include lt;Servo.h>Servo myservo- // créer objet asservi pour contrôler un servoint potpin = 0- // broche analogique utilisée pour raccorder le potentiomètreint Val // variable pour lire la valeur de la configuration pinvoid analogique () {myservo.joindre(9) - // attache le servo sur la broche 9 à l'objet de servo} void loop de () {val = analogRead(potpin) - // lit la valeur du potentiomètre // (valeur entre 0 et 1023 //) val = carte(val, 0, 1023, 0, 179) - // échelle pour l'utiliser avec // le servo (valeur entre 0 et 180 //) myservo.écrire(Val) - // définit la position d'asservissement selon // à la valeur à l'échelleretard(15) - // attend pour le servo arriver}Vous remarquerez peut-être qu'il ya quelques divergences entre les commentaires et le code. Lorsqu'on se réfère à la gamme de degrés pour déplacer le servo, l'esquisse mentionne à la fois de 0 à 179 et 0 à 180. Avec tous les tutoriels Arduino, il est préférable de supposer qu'ils sont des travaux en cours et ne sont pas toujours exactes.
La plage correcte est de 0 à 179, ce qui vous donne 180 valeurs. Le comptage de zéro est désigné par indexation zéro et est un phénomène fréquent dans Arduino, comme vous avez pu le constater par ce point.
Après avoir trouvé le croquis, appuyez sur le bouton de compilation pour vérifier le code. Le compilateur doit mettre en évidence les erreurs de syntaxe dans la boîte de message, qui allume en rouge quand ils sont découverts.
Si l'esquisse compile correctement, cliquez sur Télécharger pour télécharger l'esquisse à votre conseil. Lorsque cela est fait le téléchargement, votre servo devrait tourner que vous tournez votre potentiomètre.
Si tel est pas ce qui arrive, vous devriez vérifier votre câblage:
Assurez-vous que vous utilisez la broche 9 pour relier les données (blanc / jaune) en ligne à l'asservissement.
Vérifiez vos connexions au potentiomètre et assurez-vous que la broche centrale est reliée à la broche analogique 0.
Vérifiez les connexions sur la carte de test. Si les fils de saut ou des composants ne sont pas connectés en utilisant les lignes correctes dans la planche à pain, ils ne fonctionneront pas.
La ventilation Bouton de croquis
Dans les déclarations, la bibliothèque d'asservissement, Servo.h, et un nouvel objet d'asservissement sont nommés. La broche d'entrée analogique est déclaré avec une valeur de 0, montrant que vous utilisez analogique 0.
Vous avez peut-être remarqué que la broche est numéroté 0, A0 pas comme dans les autres exemples. Soit est bien, parce que A0 est juste un alias de 0, A1 est de 1, et ainsi de suite. Utilisation A0 est bon pour plus de clarté, mais facultatif.
Il existe une dernière variable pour stocker la valeur de la lecture, qui va devenir la sortie.
#comprendre lt;Servo.h>Servo myservo- // créer objet asservi pour contrôler un servoint potpin = 0- // broche analogique utilisée pour raccorder le potentiomètreint Val // variable pour lire la valeur de la broche analogique
Dans la configuration, le seul élément à définir est myservo, qui utilise 9 broches.
void setup () {myservo.joindre(9) - // attache le servo sur la broche 9 à l'objet de servo}Plutôt que d'utiliser deux variables distinctes pour l'entrée et la sortie, ce croquis utilise simplement un. Premier, val est utilisé pour stocker les données de capteur brut, d'une valeur de 0 à 1023. Cette valeur est ensuite traitée à l'aide de la carte fonction à l'échelle de sa gamme à celle de l'asservissement: 0-179.
Cette valeur est ensuite écrit à l'aide de servo myservo.write. Il ya aussi un retard de 15 millisecondes pour atteindre cet endroit. Ensuite, la boucle se répète et met à jour sa position si nécessaire.
void loop () {val = analogRead(potpin) - // lit la valeur du potentiomètre // (valeur entre 0 et 1023) val = carte(val, 0, 1023, 0, 179) - // échelle pour l'utiliser avec le servo // (valeur entre 0 et 180) myservo.écrire(Val) - // définit la position d'asservissement selon la // la valeur réduiteretard(15) - // attend pour le servo arriver}Avec cette simple addition au circuit, il est possible de contrôler un servomoteur avec toute sorte de l'entrée. Dans cet exemple, le code utilise une entrée analogique, mais avec quelques changements, il pourrait tout aussi bien utiliser une entrée numérique.
-
 Comment faire pour contrôler les GPIO de BEAGLEBONE
Comment faire pour contrôler les GPIO de BEAGLEBONE -
 Réglage GPIO de BEAGLEBONE comme entrées
Réglage GPIO de BEAGLEBONE comme entrées -
 Comment ajouter et tester le relais pour votre entrée projet Arduino système de clavier
Comment ajouter et tester le relais pour votre entrée projet Arduino système de clavier -
 Comment ajouter et tester l'écran LCD pour votre projet d'horloge Arduino
Comment ajouter et tester l'écran LCD pour votre projet d'horloge Arduino -
 Comment assembler le module RTC pour votre projet d'horloge Arduino
Comment assembler le module RTC pour votre projet d'horloge Arduino -
 Comment calibrer vos entrées avec le Arduino
Comment calibrer vos entrées avec le Arduino
Parfois, vous avez besoin d'avoir plus de contrôle sur la vitesse de votre moteur, qui l'Arduino vous permet de faire avec l'esquisse MotorSpeed. Ce qui suit vous montre comment contrôler la vitesse de votre moteur avec le même circuit.Le croquis…
Besoin d'un plus grand contrôle de votre moteur à courant continu? Vous pouvez utiliser le croquis MotorControl pour l'Arduino pour mettre un peu d'entrée dans un moteur à courant continu pour vous donner le plein contrôle du moteur à la…
Vous pouvez créer des mouvements de balayage sur un servomoteur avec l'Arduino. A balayages de servomoteurs de 0 # 186- 186- 179 #, puis de nouveau, d'une manière semblable au mouvement d'une vieille horloge rotative.L'esquisse de balayageTu as…
L'Arduino vous permet d'aller au-delà de la lecture d'un son - vous créez votre propre instrument, semblable à la Theremin. La Theremin, nommé d'après son inventeur L # 233 sur Theremin, a été l'un des premiers instruments électroniques,…
La seule chose de mieux que d'envoyer des signaux à traitement envoie des signaux multiples, non? Envoyer des signaux multiples est souvent une pierre d'achoppement, cependant, parce que même si l'envoi de valeurs à partir de plusieurs capteurs…
Le moteur à courant continu dans votre kit Arduino est le plus fondamental de moteurs électriques et est utilisé dans tous les types de l'électronique de loisirs. Lorsque le courant est passé à travers, il tourne en continu dans une direction…
Ces projets Arduino sont conçus pour afficher la valeur des intrants à l'aide du en série moniteur. Sériel un procédé de communication entre un périphérique et un ordinateur. Dans ce cas, il est la communication série sur Universal Serial…
L'esquisse précédente vous a montré comment utiliser un digitalRead à lire soit allumé ou éteint, mais que faire si vous voulez gérer une valeur analogique comme un interrupteur ou une commande de bouton de volume gradateur?Pour ce projet,…
Ceci est la première et peut-être la plus fondamentale d'entrées que vous pouvez et devez apprendre à vos projets Arduino: le bouton-poussoir modeste. Pour ce projet Arduino, vous devrez:Un Arduino UnoUne maquetteUne résistance de 10k ohmsUn…
Pour créer un mouvement, vous pouvez ajouter un dispositif très utile, appelé servo, à votre projet de l'électronique. UN servo est un type spécial de moteur qui est conçu pour tourner à une position particulière et maintenez cette position…
Pour créer un mouvement dans votre projet de l'électronique, vous pouvez ajouter un dispositif très utile, appelé servo, qui vous permet de contrôler le mouvement mécanique avec un programme BASIC Stamp. UN servo est un type spécial de moteur…
Si vous construisez un robot, vous faites beaucoup de connexions électriques, de sorte que vous faites affaire avec beaucoup d'épingles. Le tableau suivant montre le signal de connecteurs d'expansion et les numéros de broches. Il peut aider à…
UN potentiomètre (souvent appelé pot) Est une résistance variable électronique avec un bouton vous pouvez tourner à varier la résistance. Pots de divers types sont souvent utilisés comme dispositifs d'entrée pour les projets BASIC Stamp. Par…
UN servo est un type spécial de moteur pour une utilisation dans l'électronique qui est conçu pour tourner à une position particulière et maintenez cette position jusqu'à ce que dit de tourner à une position différente. Loisir servos sont…