Comment mesurer la distance avec l'Arduino
Deux capteurs pour mesurer la distance avec l'Arduino sont extrêmement populaires: le capteur de proximité infrarouge et le télémètre à ultrasons. Ils fonctionnent de façon similaire et atteindre à peu près la même chose, mais il est important de choisir le bon capteur pour l'environnement que vous êtes dans.
Un capteur de proximité infrarouge a une source de lumière et un capteur. La source de lumière rebondit sur les objets de la lumière infrarouge et vers le capteur, et le temps qu'il faut pour retourner la lumière est mesurée pour indiquer à quelle distance un objet est.
Un télémètre à ultrasons déclenche des ondes sonores à haute fréquence et écoute un écho quand ils ont frappé une surface solide. En mesurant le temps que cela prend un signal de rebondir, le télémètre à ultrasons peut déterminer la distance parcourue.
Capteurs de proximité infrarouges ne sont pas aussi précis et ont une portée beaucoup plus courte que les télémètres à ultrasons.
Considérez ce qui suit lors de la planification:
Complexité: Ces deux capteurs sont conçus pour être extrêmement facile à intégrer avec des projets Arduino. Dans le monde réel, ils sont utilisés pour des applications électroniques similaires, tels que les compteurs de proximité sur le dos des voitures qui émettent un bip quand vous approchez du trottoir. Encore une fois, la complexité principale est de les loger de manière efficace.
Des capteurs de proximité à infrarouge tels que ceux fabriqués par forme ont des trous de vis à l'extérieur utiles du corps du capteur. Maxbotix fait télémètres à ultrasons qui ne disposent pas de ces supports, mais leur forme cylindrique rend simple à monter dans une surface en perçant un trou à travers.
Coût: Capteurs de proximité infrarouge coûtera environ 15 $ (# 163-10) et ont une portée jusqu'à environ 59 pouces ou moins. Gamme des ultrasons trouveurs ont beaucoup plus large possible et la précision, mais aussi un grand prix, coûte entre 27 $ (de 163 à 18 #) pour un capteur qui peut lire jusqu'à 254 pouces (645 cm) et 100 $ (# 163-65) pour un modèle plus résistant aux intempéries qui peut lire jusqu'à 301 pouces (765 cm).
Où: Une application courante pour ces capteurs surveille présence d'une personne ou d'un objet dans un espace de plancher particulier, surtout quand un tampon de pression serait trop évident ou facile à éviter, ou quand un capteur PIR mesurerait trop largement. L'utilisation d'un capteur de proximité vous permet de savoir où quelqu'un est en ligne droite à partir de ce capteur, ce qui en fait un outil très utile.
IR capteurs de proximité sont bien dans les environnements sombres, mais terriblement effectuer en plein soleil. Le Range Maxbotix ultrasons Finder est l'un des capteurs les plus fiables. Lors de l'utilisation des télémètres à ultrasons, vous pouvez également choisir la façon large ou étroite d'un faisceau vous voulez. Un grand capteur, en forme de larme est parfait pour détecter de larges objets en mouvement dans une direction générale, tandis que les faisceaux étroits sont parfaits pour la mesure de précision.
Dans cet exemple, vous apprendrez à mesurer des distances précises à l'aide d'un Module Sonar LV-EZ0. Le EZ0, EZ1, EZ2, EZ3 et EZ4 fonctionnent tous de la même façon, mais chacun a un faisceau légèrement plus étroit, afin de choisir celui qui convient à votre projet.
Le télémètre a besoin d'une Assemblée mineur. Pour utiliser le télémètre dans votre circuit, vous devez soit souder sur les broches tête de l'utiliser sur une planche à pain, ou de la soudure sur des longueurs de fil.
Vous avez trois façons de connecter votre télémètre: en utilisant analogique, largeur d'impulsion, ou communication série. Dans cet exemple, vous apprendrez à mesurer la largeur d'impulsion et de convertir que de la distance. La sortie analogique peut être lu directement dans vos broches d'entrée analogiques mais fournissent des résultats moins précis que la largeur d'impulsion. Cet exemple ne couvre pas les communications série.
Tu as besoin:
Un Arduino Uno
Un Finder LV-EZ0 gamme des ultrasons
Fils de saut
Remplissez le circuit de la disposition et de schémas de circuit. Les connexions pour le télémètre sont clairement marqués sur la face inférieure de la platine. Les connexions 5V et GND fournissent la puissance pour le capteur et devraient être reliées aux fournitures 5V et GND sur votre Arduino.
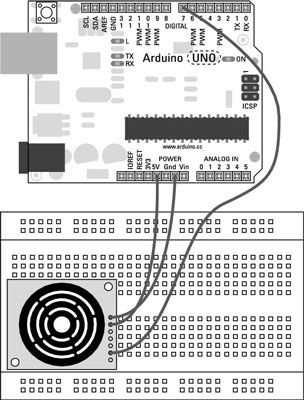
La connexion PW est le signal de largeur d'impulsion qui sera lu par la broche 7 sur votre Arduino. Assurez-vous que votre capteur de distance est fixée à une sorte de base pointue dans le sens que vous voulez mesurer.

Vous pouvez trouver le code MaxSonar par Bruce Allen dans la cour Arduino, avec quelques notes et des fonctions supplémentaires. Créer une nouvelle esquisse, copier ou tapez le code en elle, et l'enregistrer avec un nom mémorable, tels que myMaxSonar.
. // Sentez-vous libre d'utiliser ce code # 8232 - // S'il vous plaît être respectueux en reconnaissant l'auteur dans le code si vous utilisez ou modifiez # 8232 - // Auteur:. Bruce Allen # 8232 - // Date: 23/07 / 09 # 8232- # 8232 - // numérique 7 broches pour la lecture dans la largeur d'impulsion de l'appareil MaxSonar # 8232 -. // Cette variable est une constante parce que la broche ne changera pas tout au long de l'exécution de ce code.const int pwPin = 7- # 8232 - // variables nécessaires pour stocker des valeurslong pouls, pouces, la configuration du CM-void () {// Ceci ouvre une connexion série pour tirer les résultats vers le PC consoleSerial.begin (9600) -} void loop () {pinMode (pwPin, INPUT) - // Utilisé à lire dans l'impulsion qui est envoyé par le dispositif MaxSonar .// Pulse Width représentation avec un facteur d'échelle de 147 US par Inch.pulse = pulseIn(pwPin, HAUT) - // 147uS par inchinches = impulsions / 147 - // changement pouces à centimetrescm = pouces * 2,54 Serial.print (pouces) -Serial.print («in») -Serial.print (cm) -Serial.print ("CM") - Serial.println () -retard(500) -}Appuyez sur le bouton de compilation pour vérifier votre code. Le compilateur met en lumière les erreurs grammaticales, les transformant rouge quand ils sont découverts. Si l'esquisse compile correctement, cliquez sur Télécharger pour envoyer l'esquisse à votre conseil. Lorsque cela est fait de télécharger, d'ouvrir le moniteur de série et vous devriez voir la distance mesurée en pouces et en centimètres. Si la valeur est fluctuante, essayez d'utiliser un objet avec une plus grande surface.
Cette esquisse vous permet de mesurer avec précision la distance en ligne droite. Testez en appuyant avec un ruban à mesurer et faire des ajustements au code si vous trouvez des anomalies.
-
 Capteurs intégrés à votre tablette Windows 8
Capteurs intégrés à votre tablette Windows 8 -
 Ajouter le lecteur RFID à votre système d'entrée du clavier
Ajouter le lecteur RFID à votre système d'entrée du clavier -
 Comment calibrer vos entrées avec le Arduino
Comment calibrer vos entrées avec le Arduino - Comment modifier la vitesse d'un moteur à courant continu avec l'Arduino
-
 Comment contrôler la vitesse d'un moteur à courant continu avec la arduino
Comment contrôler la vitesse d'un moteur à courant continu avec la arduino -
 Comment contrôler votre servo avec l'Arduino
Comment contrôler votre servo avec l'Arduino
Vous pouvez créer des mouvements de balayage sur un servomoteur avec l'Arduino. A balayages de servomoteurs de 0 # 186- 186- 179 #, puis de nouveau, d'une manière semblable au mouvement d'une vieille horloge rotative.L'esquisse de balayageTu as…
Un infrarouge passif (PIR) capteur est un capteur commun dans certaines maisons et la plupart des bâtiments commerciaux et vous permet de détecter les mouvements de l'Arduino. Vous avez peut-être vu ce capteur dans le coin d'une pièce, rouge…
L'Arduino vous permet d'aller au-delà de la lecture d'un son - vous créez votre propre instrument, semblable à la Theremin. La Theremin, nommé d'après son inventeur L # 233 sur Theremin, a été l'un des premiers instruments électroniques,…
Vous apprendrez comment faire un bouton à l'écran dans le traitement qui affecte une LED physique sur votre Arduino. Ceci est une excellente esquisse pour commencer avec des interactions entre les ordinateurs et le monde réel, et entre un Arduino…
La seule chose de mieux que d'envoyer des signaux à traitement envoie des signaux multiples, non? Envoyer des signaux multiples est souvent une pierre d'achoppement, cependant, parce que même si l'envoi de valeurs à partir de plusieurs capteurs…
Le moteur à courant continu dans votre kit Arduino est le plus fondamental de moteurs électriques et est utilisé dans tous les types de l'électronique de loisirs. Lorsque le courant est passé à travers, il tourne en continu dans une direction…
Ces projets Arduino sont conçus pour afficher la valeur des intrants à l'aide du en série moniteur. Sériel un procédé de communication entre un périphérique et un ordinateur. Dans ce cas, il est la communication série sur Universal Serial…
L'esquisse précédente vous a montré comment utiliser un digitalRead à lire soit allumé ou éteint, mais que faire si vous voulez gérer une valeur analogique comme un interrupteur ou une commande de bouton de volume gradateur?Pour ce projet,…
Beaucoup de circuits électroniques détectent la lumière invisible qui est communément appelé infrarouge. La lumière infrarouge est la lumière dont la fréquence est juste en dessous de la gamme de la lumière rouge visible. Plus…
La combinaison d'une diode infrarouge émettrice de lumière (LED IR) et d'une photodiode est souvent utilisé en tant que détecteur de proximité, un gadget électronique qui détecte quand un objet se trouve à proximité.Une façon de construire…
Capteurs d'image de tous les appareils photo numériques sont constitués des mêmes composants. Ces composants permettent de déterminer la façon dont les dossiers de capteur de votre appareil photo lumière et donc la façon dont l'image…
Deux principaux types de capteurs sont utilisés dans les appareils photo numériques d'aujourd'hui: CCD (dispositif à couplage de charge) et CMOS (Complementary metal-oxide semiconductor) imageurs. Bien que chaque type de capteur utilise une…
Il ya une chose importante à retenir à propos de focales: Ils ne jouent pas le même comme ils le faisaient sur caméras 35mm si vous avez un capteur qui est inférieure à un cadre de 35mm film. Si vous avez un appareil photo avec un capteur plus…
Une des meilleures façons de transformer une lentille de la caméra ordinaire en une lentille macro ou close-up est d'utiliser un tube d'extension - une pièce d'équipement fixé en place entre la lentille et le corps de l'appareil photo afin de…