Comment faire tourner un moteur à courant continu avec l'Arduino
Le moteur à courant continu dans votre kit Arduino est le plus fondamental de moteurs électriques et est utilisé dans tous les types de l'électronique de loisirs. Lorsque le courant est passé à travers, il tourne en continu dans une direction jusqu'à ce que les butées actuelles. Sauf expressément marqués d'un + ou -, moteurs à courant continu ont pas de polarité, ce qui signifie que vous pouvez permuter les deux fils sur pour inverser le sens du moteur.
Le croquis Motor
Vous aurez besoin d'un circuit de commande simple de transformer votre moteur en marche.
Tu as besoin:
Un Arduino Uno
Une maquette
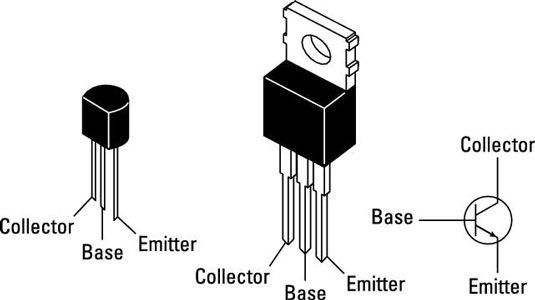
Transistor
Un moteur à courant continu
Une diode
Une résistance de 2.2k ohms
Fils de saut
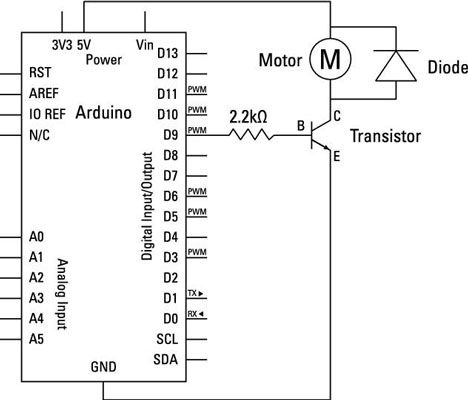
Pour alimenter le moteur, vous devez envoyer 5V à travers elle, puis sur un terrain. Cette tension le moteur tourne, mais vous avez le contrôle de celui-ci. Pour donner à votre commande Arduino de la puissance du moteur, et donc sa rotation, vous placez un transistor juste après le moteur.
Le transistor est un commutateur à commande électrique qui peut être activé par des broches numériques de votre Arduino. Dans cet exemple, il est contrôlé par la broche 9 sur votre Arduino, de la même manière comme une LED, sauf que le transistor permet le tour du circuit du moteur sur et en dehors.
Ce circuit fonctionne, mais il permet encore la chance de créer un courant inverse en raison de la dynamique du moteur car elle ralentit, ou parce que le moteur pourrait être tourné. Si le courant inverse est générée, elle se déplace du côté négatif du moteur et essaie de trouver l'itinéraire le plus facile à la terre.
Cet itinéraire peut être à travers le transistor ou par l'Arduino. Vous ne pouvez pas savoir avec certitude ce qui se passera, si vous avez besoin de fournir un moyen de contrôler ce courant excédentaire.
Pour être sûr, vous placez une diode à travers le moteur. La diode est tournée vers la source de la tension, ce qui signifie que la tension est forcé à travers le moteur, qui est ce que vous voulez. Si le courant est généré dans le sens inverse, il est maintenant bloqué et circulant dans le Arduino.
Si vous placez la diode dans le mauvais sens, le courant contourne le moteur et vous créer un court-circuit. Le court-circuit tente de terre tout le courant disponible et pourrait briser votre port USB ou à tout le moins, affiche un message d'avertissement vous informant que votre port USB absorbe trop de pouvoir.
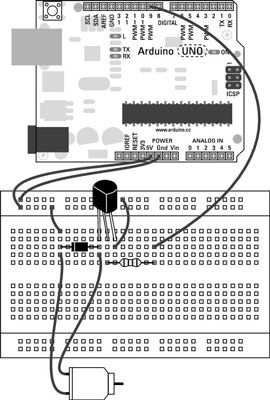
Construire le circuit comme indiqué, et ouvrir une nouvelle esquisse Arduino. Cliquez sur le bouton Enregistrer et enregistrez le croquis avec un nom mémorable, comme myMotor, puis tapez le code suivant:
int motorPin = configuration 9-void () {pinMode(motorPin, SORTIE) -} void loop () {digitalWrite (motorPin, HIGH) -retard(1000) -digitalWrite(motorPin, FAIBLE) -retard(1000) -}Une fois que vous avez tapé le croquis, le sauvegarder et appuyez sur le bouton de compilation pour vérifier votre code. L'Arduino Environnement vérifie votre code pour les erreurs de syntaxe (grammaire pour votre code) et les met en surbrillance dans la zone de message. Les erreurs les plus courantes comprennent les fautes de frappe, des points-virgules manquants, et sensibilité à la casse.
Si l'esquisse compile correctement, cliquez sur Télécharger pour télécharger l'esquisse à votre conseil. Vous devriez voir votre moteur en rotation pendant une seconde et l'arrêt pendant une seconde à plusieurs reprises.
Si cela ne ce qui se passe, vous devriez vérifier votre câblage:
Assurez-vous que vous utilisez le numéro de la broche 9.
Vérifiez que votre diode est confrontée à la bonne façon, avec le groupe face à la connexion 5v.
Vérifiez les connexions sur la carte de test. Si les fils de saut ou des composants ne sont pas connectés en utilisant les lignes correctes dans la planche à pain, ils ne fonctionneront pas.
La répartition croquis Motor
Ceci est un croquis très basique, et vous remarquerez peut-être qu'il est une variation sur le croquis Blink. Cet exemple modifie le matériel, mais utilise le même code pour contrôler une LED.
Tout d'abord, la broche est déclarée en utilisant la broche numérique 9.
int motorPin = 9-
Dans la configuration, la broche 9 est défini comme une sortie.
void setup () {pinMode(motorPin, SORTIE) -}La boucle raconte le signal de sortie pour aller à HAUT, attendre 1000mS (1 seconde), aller à FAIBLE, attendre encore 1000mS, puis répéter. Ce scénario vous donne le plus fondamental du contrôle moteur, racontant le moteur quand il faut aller sur et en dehors.
void loop () {digitalWrite (motorPin, HIGH) -retard(1000) -digitalWrite(motorPin, FAIBLE) -retard(1000) -} -
 Mise sous tension de la PI de framboise
Mise sous tension de la PI de framboise -
 Comment ajouter et tester le relais pour votre entrée projet Arduino système de clavier
Comment ajouter et tester le relais pour votre entrée projet Arduino système de clavier -
 Comment calibrer vos entrées avec le Arduino
Comment calibrer vos entrées avec le Arduino -
 Comment modifier la vitesse d'un moteur à courant continu avec l'Arduino
Comment modifier la vitesse d'un moteur à courant continu avec l'Arduino -
 Comment contrôler la vitesse d'un moteur à courant continu avec la arduino
Comment contrôler la vitesse d'un moteur à courant continu avec la arduino -
 Comment contrôler votre servo avec l'Arduino
Comment contrôler votre servo avec l'Arduino
Vous pouvez créer des mouvements de balayage sur un servomoteur avec l'Arduino. A balayages de servomoteurs de 0 # 186- 186- 179 #, puis de nouveau, d'une manière semblable au mouvement d'une vieille horloge rotative.L'esquisse de balayageTu as…
Une fois que vous avez mis en place tous les pieves pour votre projet Système d'entrée Clavier Arduino, vous devez définir la configuration. Dans le installer() section de votre code, vous préparer le Arduino pour exécuter ce…
L'Arduino vous permet d'aller au-delà de la lecture d'un son - vous créez votre propre instrument, semblable à la Theremin. La Theremin, nommé d'après son inventeur L # 233 sur Theremin, a été l'un des premiers instruments électroniques,…
Vous apprendrez comment faire un bouton à l'écran dans le traitement qui affecte une LED physique sur votre Arduino. Ceci est une excellente esquisse pour commencer avec des interactions entre les ordinateurs et le monde réel, et entre un Arduino…
Le contenu de circuits et croquis Arduino peut varier considérablement. Avant de commencer, il ya un processus simple pour télécharger un croquis à une carte Arduino que vous pouvez renvoyer à.Suivez ces étapes pour télécharger votre…
Ces projets Arduino sont conçus pour afficher la valeur des intrants à l'aide du en série moniteur. Sériel un procédé de communication entre un périphérique et un ordinateur. Dans ce cas, il est la communication série sur Universal Serial…
L'esquisse précédente vous a montré comment utiliser un digitalRead à lire soit allumé ou éteint, mais que faire si vous voulez gérer une valeur analogique comme un interrupteur ou une commande de bouton de volume gradateur?Pour ce projet,…
Ceci est la première et peut-être la plus fondamentale d'entrées que vous pouvez et devez apprendre à vos projets Arduino: le bouton-poussoir modeste. Pour ce projet Arduino, vous devrez:Un Arduino UnoUne maquetteUne résistance de 10k ohmsUn…
La broche de sortie (broche 3) d'un circuit de minuterie électronique 555 peut être dans l'un des deux états: haute et basse. Dans l'état haut, la tension à la broche est proche de la tension d'alimentation. L'état bas est de 0 V.Il ya deux…
Deux transistors électroniques peuvent être raccordés pour former un Transistor Darlington (parfois appelé Paire Darlington), qui peut passer beaucoup plus de courant que le circuit collecteur-émetteur d'un transistor norme CAN. Vous pouvez…
Ce projet présente un circuit de planche à pain qui pousse un petit 3 V moteur à courant continu à partir d'un port parallèle. Parce que ce moteur utilise beaucoup plus de courant que d'un port parallèle peut gérer, un tableau ULN2003…
Ce projet montre comment assembler un simple transistor porte NON sur une planche à pain sans soudure. Pour ce projet, de l'électronique, un bouton-poussoir normalement ouvert est utilisé comme entrée. Lorsque le bouton est pas pressé,…
Chacun des huit broches de sortie de données sur un port parallèle fournit 5 V CC à votre circuit électronique. Ce montant de tension peut approvisionner environ 10 mA ou 12 mA - assez pour conduire une LED directement. Alternativement, vous…
L'une des utilisations les plus courantes pour transistors dans un circuit électronique est comme de simples interrupteurs. En bref, un transistor conduit le courant à travers le trajet collecteur-émetteur uniquement lorsqu'une tension est…